FANUC機器人保養(yǎng): J1軸馬達更換流程
類別:行業(yè)動態(tài)日期:2019-12-13 09:48:07
一、概述
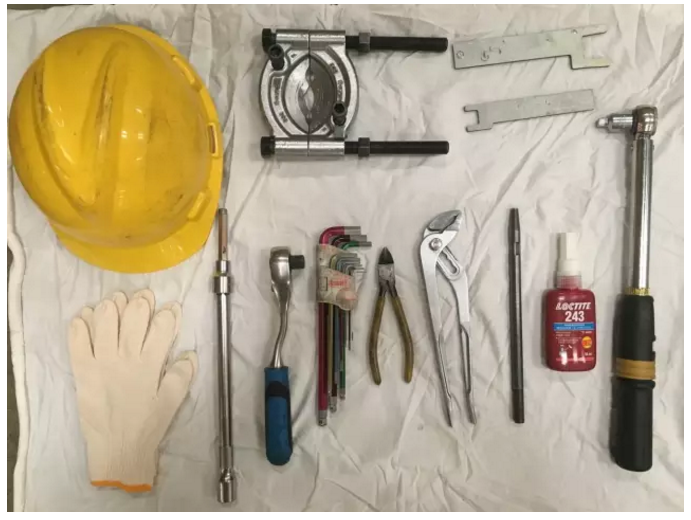
本文是按發(fā)那科機器人常見安裝姿態(tài)下(地面0度角安裝時)進行馬達的安裝拆卸����。不適用在90度����,180度安裝姿態(tài)時馬達的更換作業(yè)����。本文以R‐2000iB/210F機型作為參照標準制作����。前期需準備如圖所示的基本工具。
機器人型號:R-2000iB /210F
控制柜型號:R-30iA
二����、機器人馬達的更換過程
2.1拆卸馬達處接線
關閉控制柜電源,記錄馬達的安裝方向����,使用魚嘴鉗松開線纜連接器,用手擰下馬達動力線纜����、剎車線纜及編碼器線纜。
2.2 拆卸馬達
使用10MM 內(nèi)六角套筒扳手拆卸下J1 軸馬達的3 顆 M12 固定螺絲
向上拔出馬達����,檢查馬達基座處密封圈,確認其安裝位置正確
使用干凈的抹布將馬達基座遮蓋����,防止現(xiàn)場有異物進入減速機內(nèi)部
2.3 拆卸馬達輸入齒輪
使用 5MM 內(nèi)六角拆卸下輸入齒前段固定螺絲����,使用拉碼將輸入齒輪從馬達上拆下
2.4 更換新馬達����,安裝輸入齒輪
將輸入齒裝在新馬達上,(注意新馬達軸上的鍵不要遺漏安裝)����,在輸入齒輪的前端固定螺絲螺紋前部涂抹上樂泰 243 螺紋膠。
使用扭力扳手將輸入齒輪前端固定螺絲擰緊����,扭力要求為 15.7N•M
2.5 固定新馬達,做好標記
將新馬達安裝回機器人處����,注意馬達的安裝方向。將3 顆M12 的馬達固定螺絲扭緊����,緊固馬達。并重新連接馬達處所有線纜����。在固定螺絲處使用黃色記號筆做上標記。
2.6 重新校準機器人零位
由于更換馬達會導致機器人丟失零位����,所以客戶需按照機器人使用說明書,重新對機器人的單軸零位進行校準����。(文章來源于:網(wǎng)絡)
了解更多:發(fā)那科機器人
- 在線客服
- 服務熱線
- 微信咨詢
- 返回頂部